
Grupo 2 – Semana 4
En esta cuarta semana, nos hemos dedicado a la fabricación de la maqueta, ya que ya tenemos los materiales necesarios para el montaje eléctrico, el cual estamos trabajando en ello..



Grupo 3 Semana Cuarta
Este fin de semana hemos estado terminando la maqueta. Hemos estado pintado y preparando toda la electrónica. Ya os mantendremos informados.



Grupo 1 – Semana 4
En esta semana hemos recibido el driver de motores L298P para arduino, por lo que nos hemos puesto manos a la obra con la programación.
Ya hemos conseguido controlar con móvil por medio de bluetooth uno de los dos motores que ésta shield nos permite colocar, pero conseguir controlar el segundo motor no va a suponer un gran desafío teniendo ya la base del programa.
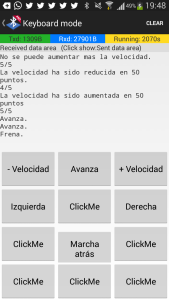
El programa que vamos a dejar a continuación nos permite controlar (por ahora) un solo motor, que corresponde al canal A del controlador de motores. Mediante el móvil y una conexión bluetooth, podremos controlar el motor para que gire en una dirección o en otra, además de tener 5 velocidades diferentes.
En la pantalla del móvil podremos visualizar el estado del motor (Velocidad y dirección de giro).
CÓDIGO
#include<SoftwareSerial.h> //Crea una comunicación por medio de software
int Tx = 2;
int Rx = 4;
int referencia = 0;
int contadorVelocidad;
int contador = 0;
int velocidadA = 3;
int velocidadB = 11;
int direccionA = 12;
int direccionB = 13;
int frenaA = 9;
int frenaB = 8;
char valueBT;
char valueSerial;
char adelante = 118; //Carácter v
char atras = 97; //Carácter a
char dcha = 100; //Carácter d
char izda = 105; //Carácter i
char para = 112; //Carácter p
char mas = 109; //Carácter m
char menos = 110; //Carácter n
SoftwareSerial BT1 (Rx, Tx); //Establece el nombre y los pines Rx (4) y Tx (2) para la comunicación por software.
void setup(){
Serial.begin(9600); //Inicia la comunicación por el monitor serial
BT1.begin(9600); //Inicia la comunicación por software
//Setup Canal A
pinMode(velocidadA, OUTPUT);
pinMode(direccionA, OUTPUT);
pinMode(frenaA, OUTPUT);
//Setup Canal B
pinMode(velocidadB, OUTPUT);
pinMode(direccionB, OUTPUT);
pinMode(frenaB, OUTPUT);
}
void loop(){
again:
valueBT = BT1.read(); //Almacena los datos leídos por el bluetooth en la variable valueBT
valueSerial = Serial.read(); //Almacena los datos leídos por el monitor serial en la variable valueSerial
if (valueBT – adelante == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a adelante (v) sea igual a referencia (0)…
while(digitalRead(9) == HIGH){ //Si el freno del canal A está activado…
digitalWrite(frenaA, LOW); //descativa el freno.
}
digitalWrite(direccionA, HIGH); //El motor del canal A gira.
analogWrite(velocidadA, contadorVelocidad); //Ajusta la velocidad del motor del canal A.
Serial.println(«Avanza.»);
BT1.println(«Avanza.»);
}
if (valueBT – atras == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a atras (a) sea igual a referencia (0)…
while(digitalRead(9) == HIGH){ //Cuando el freno del canal A esté activado…
digitalWrite(frenaA, LOW); //…descativa el freno.
}
digitalWrite(direccionA, LOW); //Invierte el giro del motor del canal A.
analogWrite(velocidadA, contadorVelocidad); //Ajusta la velocidad del motor del canal A.
Serial.println(«Marcha atras.»);
BT1.println(«Marcha atras.»);
}
if (valueBT – dcha == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a dcha (d) sea igual a referencia (0)…
Serial.println(«Gira a la derecha.»);
BT1.println(«Gira a la derecha.»);
}
if (valueBT – izda == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a izda (i) sea igual a referencia (0)…
Serial.println(«Gira a la izquierda.»);
BT1.println(«Gira a la izquierda.»);
}
if (valueBT – para == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a para (p) sea igual a referencia (0)…
digitalWrite(frenaA, HIGH); //Activa el freno del canal A.
Serial.println(«Frena.\n»);
BT1.println(«Frena.\n»);
}
if (valueBT – mas == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a mas (m) sea igual a referencia (0)…
contadorVelocidad = contadorVelocidad + 50; //…la variable contadorVelocidad aumenta en 50.
contador = contador + 1; //…la variable contador aumenta en 1.
if (contador != 6){ //Si la variable contador no es igual a 6…
Serial.println(«La velocidad ha sido aumentada en 50 puntos»);
Serial.print(contador);
Serial.print(«/5\n»);
BT1.println(«La velocidad ha sido aumentada en 50 puntos»);
BT1.print(contador);
BT1.print(«/5\n»);
}
while (contador == 6){ //Cuando la variable contador sea igual a 6…
contador = contador – 1; //…reduce en 1 contador.
Serial.println(«No se puede aumentar mas la velocidad.»);
Serial.print(contador);
Serial.print(«/5\n»);
BT1.println(«No se puede aumentar mas la velocidad.»);
BT1.print(contador);
BT1.print(«/5\n»);
}
while (contadorVelocidad == 300){ //Cuando contadorVelocidad sea igual a 300…
contadorVelocidad = contadorVelocidad – 50; //…reduce contador en 50.
}
Serial.println(contadorVelocidad);
}
if (valueBT – menos == referencia){ //Si el valor leído por bluetooth menos el carácter asignado a menos (n) sea igual a referencia (0)…
contadorVelocidad = contadorVelocidad – 50; //…la variable contadorVelocidad se reduce en 50.
contador = contador – 1; //…la variable contador se reduce en 1.
if (contador != -1){ //Si la variable contador no es igual a -1…
Serial.println(«La velocidad ha sido reducida en 50 puntos.»);
Serial.print(contador);
Serial.print(«/5\n»);
BT1.println(«La velocidad ha sido reducida en 50 puntos.»);
BT1.print(contador);
BT1.print(«/5\n»);
}
while (contador == -1){ //Cuando la variable contador sea igual a -1…
contador = contador + 1; //…aumenta en 1 contador.
Serial.println(«No se puede reducir mas la velocidad.»);
Serial.print(contador);
Serial.print(«/5\n»);
BT1.println(«No se puede reducir mas la velocidad.»);
BT1.print(contador);
BT1.print(«/5\n»);
}
while (contadorVelocidad == -50){ //Cuando la variable contadorVelocidad sea igual a -50…
contadorVelocidad = contadorVelocidad + 50; //…aumenta contador en 50.
}
Serial.println(contadorVelocidad);
}
while (((valueBT) == adelante || atras || dcha || izda) && ((valueSerial) != adelante || atras || dcha || izda)){ //Cuando los datos leídos por el bluetooh no sean igual que los datos
//leídos por el monitor serial…
goto again; //Vuelve a again.
}
}

Grupo 3 Tercera Semana
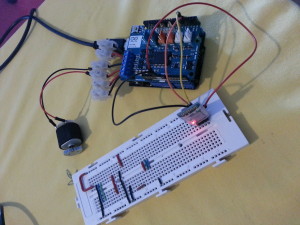
Esta semana hemos estado haciendo la maqueta en madera y preparando toda la electrónica para mas adelante ponérsela.![IMG-20160131-WA0003[1]](http://salesianosatocha.es/domit/files/2016/02/IMG-20160131-WA00031-225x300.jpg)
![IMG-20160131-WA0004[1]](http://salesianosatocha.es/domit/files/2016/02/IMG-20160131-WA00041-225x300.jpg)
![IMG-20160131-WA0005[1]](http://salesianosatocha.es/domit/files/2016/02/IMG-20160131-WA00051-225x300.jpg) .
.
Grupo 1 – Semana 3
En ésta tercera semana hemos aprovechado para comprar los materiales necesarios para el montaje de la maqueta, ya que tuvimos algunos problemas al respecto de la compra por Internet.
Además de hacer los preparativos para la maqueta, hemos empezado a probar el mando PS2 con el siguiente código:
#include //for v1.6
PS2X ps2x; // create PS2 Controller Class
//right now, the library does NOT support hot pluggable controllers, meaning
//you must always either restart your Arduino after you conect the controller,
//or call config_gamepad(pins) again after connecting the controller.
int error = 0;
byte type = 0;
byte vibrate = 0;
void setup(){
Serial.begin(9600);
//CHANGES for v1.6 HERE!!! **************PAY ATTENTION*************
error = ps2x.config_gamepad(13,11,10,12, true, true); //setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error
if(error == 0){
Serial.println(«Found Controller, configured successful»);
Serial.println(«Try out all the buttons, X will vibrate the controller, faster as you press harder;»);
Serial.println(«holding L1 or R1 will print out the analog stick values.»);
Serial.println(«Go to www.billporter.info for updates and to report bugs.»);
}
else if(error == 1)
Serial.println(«No controller found, check wiring, see readme.txt to enable debug. visit www.billporter.info for troubleshooting tips»);
else if(error == 2)
Serial.println(«Controller found but not accepting commands. see readme.txt to enable debug. Visit www.billporter.info for troubleshooting tips»);
else if(error == 3)
Serial.println(«Controller refusing to enter Pressures mode, may not support it. «);
//Serial.print(ps2x.Analog(1), HEX);
type = ps2x.readType();
switch(type) {
case 0:
Serial.println(«Unknown Controller type»);
break;
case 1:
Serial.println(«DualShock Controller Found»);
break;
case 2:
Serial.println(«GuitarHero Controller Found»);
break;
}
}
void loop(){
/* You must Read Gamepad to get new values
Read GamePad and set vibration values
ps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255)
if you don’t enable the rumble, use ps2x.read_gamepad(); with no values
you should call this at least once a second
*/
if(error == 1) //skip loop if no controller found
return;
if(type == 2){ //Guitar Hero Controller
ps2x.read_gamepad(); //read controller
if(ps2x.ButtonPressed(GREEN_FRET))
Serial.println(«Green Fret Pressed»);
if(ps2x.ButtonPressed(RED_FRET))
Serial.println(«Red Fret Pressed»);
if(ps2x.ButtonPressed(YELLOW_FRET))
Serial.println(«Yellow Fret Pressed»);
if(ps2x.ButtonPressed(BLUE_FRET))
Serial.println(«Blue Fret Pressed»);
if(ps2x.ButtonPressed(ORANGE_FRET))
Serial.println(«Orange Fret Pressed»);
if(ps2x.ButtonPressed(STAR_POWER))
Serial.println(«Star Power Command»);
if(ps2x.Button(UP_STRUM)) //will be TRUE as long as button is pressed
Serial.println(«Up Strum»);
if(ps2x.Button(DOWN_STRUM))
Serial.println(«DOWN Strum»);
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println(«Start is being held»);
if(ps2x.Button(PSB_SELECT))
Serial.println(«Select is being held»);
if(ps2x.Button(ORANGE_FRET)) // print stick value IF TRUE
{
Serial.print(«Wammy Bar Position:»);
Serial.println(ps2x.Analog(WHAMMY_BAR), DEC);
}
}
else { //DualShock Controller
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at ‘vibrate’ speed
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println(«Start is being held»);
if(ps2x.Button(PSB_SELECT))
Serial.println(«Select is being held»);
if(ps2x.Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed
Serial.print(«Up held this hard: «);
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
}
if(ps2x.Button(PSB_PAD_RIGHT)){
Serial.print(«Right held this hard: «);
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
}
if(ps2x.Button(PSB_PAD_LEFT)){
Serial.print(«LEFT held this hard: «);
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
}
if(ps2x.Button(PSB_PAD_DOWN)){
Serial.print(«DOWN held this hard: «);
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
}
vibrate = ps2x.Analog(PSAB_BLUE); //this will set the large motor vibrate speed based on
//how hard you press the blue (X) button
if (ps2x.NewButtonState()) //will be TRUE if any button changes state (on to off, or off to on)
{
if(ps2x.Button(PSB_L3))
Serial.println(«L3 pressed»);
if(ps2x.Button(PSB_R3))
Serial.println(«R3 pressed»);
if(ps2x.Button(PSB_L2))
Serial.println(«L2 pressed»);
if(ps2x.Button(PSB_R2))
Serial.println(«R2 pressed»);
if(ps2x.Button(PSB_GREEN))
Serial.println(«Triangle pressed»);
}
if(ps2x.ButtonPressed(PSB_RED)) //will be TRUE if button was JUST pressed
Serial.println(«Circle just pressed»);
if(ps2x.ButtonReleased(PSB_PINK)) //will be TRUE if button was JUST released
Serial.println(«Square just released»);
if(ps2x.NewButtonState(PSB_BLUE)) //will be TRUE if button was JUST pressed OR released
Serial.println(«X just changed»);
if(ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) // print stick values if either is TRUE
{
Serial.print(«Stick Values:»);
Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(«,»);
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(«,»);
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(«,»);
Serial.println(ps2x.Analog(PSS_RX), DEC);
}
}
delay(50);
}
Éste código lo podemos encontrar en «Ejemplos» al instalar la librería PS2X de arduino, y sirve para comprobar la lectura del mando PS2 a la plataforma arduino. A pesar de que el mando parece estar bien conexionado, el mando y la librería nos está dando problemas de compatibilidad, ya que recibe la alimentación correctamente, pero no lee ninguno de los joysticks ni pulsadores.

